CONTEÚDO
1: O que são filtros
2: Classificação dos filtros
2.1: Classificação dos filtros quanto à função
2.2: Classificação dos filtros quanto à tecnologia
2.3: Classificação dos filtros quanto à resposta
2.4: Classificação dos filtros quanto à linearidade
2.5: Classificação dos filtros – Quadro resumo
3: Elementos característicos de um filtro
1: O que são filtros
Uma das áreas mais desafiadoras da Engenharia Eletrônica é a de Projetos de Filtros. Ao mesmo tempo em que é desafiadora é de suma importância porque é necessário excluir a presença de certos sinais que não condizem com aquilo que de fato se quer.
Um dos problemas mais conhecidos é o caso da frequência de 60 Hz da rede elétrica que acaba por contaminar a leitura de sinais de baixa frequência, o que é comum, por exemplo, no caso do ECG (Eletroencefalograma).
Assim, extrair sinais, isolar sinais e potencializar sinais são os objetivos dos filtros. Esses sinais podem ser desde uma única frequência, bem como uma banda. Estas podem ser selecionadas ou rejeitadas. Qualquer que seja o caso, os filtros são elementos auxiliares, entretanto, mesmo sendo auxiliares, são indispensáveis, para o funcionamento mais eficiente de circuitos que trabalhem com sinais de frequência.
Conceitualmente, filtros elétricos são circuitos que permitem isolar sinais de frequência, os mantendo ou os rejeitando do circuito (na verdade, atenuando o sinal indesejado), seja por frequência, seja por banda de frequências, com o intuito de manter somente parte do sinal, excluindo a outra, essa chamada e considerada como ruído.
2: Classificação dos filtros
Como quase toda classificação, ela pode ocorrer sob diversas formas possíveis. São elas:
2.1 Classificação dos Filtros quanto à função
Nessa classificação os filtros são categorizados conforme o tipo de abordagem que executam para a realização da atenuação de sinais ruidosos. A abordagem pode ser tanto no sentido de permitir a passagem do sinal de interesse como a de atenuar o sinal ruidoso. O sinal trabalhado pode ser tanto uma frequência única como uma banda de frequência. Dentro dessas características, os filtros, quanto á função, podem ser classificados como:
Filtro passa-baixa (PB): Tendo uma frequência indesejável, chamada de frequência de corte (fc), a seleção do sinal é feita de tal forma que o sinal desejado está abaixo desse valor e é esse o sinal que segue no circuito e sinais acima dessa frequência são rejeitados.
Filtro passa-alta (PA): Tendo uma frequência indesejável, chamada de frequência de corte (fc), a seleção do sinal é feita de tal forma que o sinal desejado está acima desse valor e é esse o sinal que segue no circuito e sinais abaixo dessa frequência são rejeitados.
Filtro passa-faixa (PF): Tendo uma faixa de frequência desejável, sendo fc1, a frequência inferior dessa faixa e fc2, a frequência superior dessa mesma faixa, a seleção do sinal é feita de tal forma que o sinal desejado pertence a essa faixa e tudo que estiver fora dele, seja abaixo ou acima, é rejeitado (atenuado) do circuito.
Filtro rejeita-faixa (RF): Tendo uma faixa de frequência indesejável, sendo fc1, a frequência inferior dessa faixa e fc2, a frequência superior dessa mesma faixa, a seleção do sinal é feito de tal forma que todo sinal desejado está fora dessa faixa, seja abaixo, seja acima e o sinal rejeitado é a própria faixa entre fc1 e fc2.
2.2 Classificação dos Filtros quanto à tecnologia
Nessa classificação os filtros são categorizados conforme os tipos de elementos que constituem o circuito e a resposta que eles proporcionam.
Filtros Passivos: São circuitos constituídos por elementos passivos. Um elemento passivo é todo aquele que não exerce controle sobre outro componente. São elementos passivos: resistores, capacitores, indutores, transformadores e ferrites. No caso de filtros passivos, os elementos que o constituem são resistores, capacitores e indutores. São esses elementos, que quando compõem um filtro, o categorizam como um filtro passivo.
Filtros Ativos: São circuitos constituídos por elementos ativos. Um elemento ativo é todo aquele que exerce controle sobre outro componente. São elementos ativos: diodos, transistores, válvulas e amplificadores operacionais. No caso de filtros ativos, os elementos que o constituem são transistores, válvulas e amplificadores operacionais. São esses elementos, que quando compõem um filtro, o categorizam como um filtro ativo.
Filtros Digitais: São circuitos constituídos por elementos digitais. O elemento digital para esse tipo de filtro é o processador digital, o qual realiza cálculos matemáticos através de uma rotina (programa). Os cálculos aplicados referem-se a métodos e técnicas matemáticas, geralmente, mas não só, a Transformada de Fourier, e a Transformada de Hilbert. Nesse caso de filtro é necessária a presença de um processador digital, em última síntese, um hardware que consiga executar um software. Os filtros digitais podem ser classificados em dois:
Filtro Digital Recursivo (IIR): O Filtro IIR (Infinite Impulse Response, em português: Resposta ao Impulso Infinita) são usados para separação de faixas de frequências e não são inerentemente estáveis. A saída é calculada considerando o sinal de entrada e os sinais de saída anteriores, o que o torna recursivo e, por consequência, infinito porque pode gera sinal mesmo sem entrada.
No caso dos Filtros IIR, existem alguns métodos para implementação. Duas são as metodologias mais comuns:
(i) – Método da Invariância Impulsiva e
(ii) – Transformada Bilinear.
Qualquer que seja a metodologia é possível utilizar qualquer tipologia condizente ao Filtro IIR, seja, Butterworth, Bessel, Chebyshev ou Elíptico, todos eles descritos na próxima seção. Pelas tipologias é possível construir qualquer Filtro quanto à função desejada, seja, Passa Baixa, Passa Alta, Passa Faixa ou Rejeita Faixa.
Filtro Digital Não-recursivo (FIR): O Filtro FIR (Finite Impulse Response, em português: Resposta ao Impulso Finita) são, no geral, preferíveis aos filtros IIR porque são naturalmente estáveis. Os filtros FIR têm como resposta ao impulso uma resposta que retorna nula após determinado tempo, esse, finito. Para a implementação dos Filtros FIR existem três metodologias mais usuais:
(i) – Método do Janelamento;
(ii) – Implementação por Amostragem em Frequência e
(iii) – Métodos Ótimos.
Com relação ao janelamento existem 5 tipologias (janelas) mais comuns, são elas: Blackman, Hamming, Hanning (não confundir com Hamming), Retangular e Kaiser, sendo essa última a mais usual delas. Há ainda as janelas Bartlett (Triangular), Lanczos e Tukey. A partir da janela escolhida é possível construir qualquer Filtro quanto à função desejada, seja, Passa Baixa, Passa Alta, Passa Faixa ou Rejeita Faixa.
Os Filtros FIR podem ser classificados a partir da ordem M do Filtro e dos coeficientes “b” (coeficientes do numerador na Função de Transferência). Filtro FIR Tipo I: M é par e os coeficientes b são simétricos. Filtro FIR Tipo II: M é ímpar e os coeficientes b são simétricos. Filtro FIR Tipo III: M é par e os coeficientes b são antissimétricos. Por fim, o Filtro FIR Tipo IV: M é ímpar e os coeficientes b são antissimétricos. Um Filtro Passa Baixa usa as tipologias I e II. Um Filtro Passa Alta usa as tipologias I e IV. Um Filtro Passa Faixa pode usar qualquer tipologia. Um Filtro Rejeita Faixa usa somente a tipologia I.
2.3 Classificação dos Filtros quanto à resposta
A classificação quanto à resposta faz referência ao modo e comportamento de como a resposta em frequência ocorre, se com maior ou menor erro, se há ou não oscilação (ripple). Faz referência à tipologia dos Filtros. Todos os Filtros descritos nessa categoria podem ser construídos de forma analógica como digital. Como Filtros Digitais correspondem aos Filtros IIR. Como Filtros Analógicos podem ser construídos como elementos passivos ou ativos.
As principais características envolvem: (i) – o ripple, podendo esse existir em maior ou menor grau e pode ainda não apresentar ripple; (ii) – outra característica é quanto a maior ou menor linearidade quando da banda de passagem e (iii) – quanto ao tempo de resposta. Seguem as principais tipologias:
Butterworth: Filtro que garante uma resposta em frequência plana, sem ripple na faixa passante e com ripple quase nulo na faixa rejeitada. A variação é de -6 dB por década.
Elíptico: Também conhcecido como Filtro de Cauer, é um circuito com ripple tanto na faixa passante como na faixa rejeitada o que minimiza o erro máximo para as duas bandas, a de passagem e a rejeitada.
Chebyshev Tipo I: Esse filtro possui ripple na faixa passante sendo usado onde a oscilação não seja um elemento crítico.
Chebyshev Tipo II: Também conhecido como Chebyshev invertido, é um circuito sem ripple na faixa passante, mas com ripple na faixa rejeitada. Possui ótima resposta quanto à distorção de sinais quando da filtragem.
Bessel: Também conhecido como Filtro Bessel-Thomson, é um circuito que permite minimizar a distorção quando de uma operação de filtragem. Ele preserva a fase das frequências.
2.4 Classificação dos Filtros quanto à linearidade
Uma última classificação possível é quanto à linearidade dos Filtros. A linearidade de um filtro corresponde ao tipo de função que é empregado sobre o sinal de entrada, obtendo, dessa forma, um sinal de saída.
Assim, se a função matemática aplicada é linear, a relação entre o sinal de entrada e o sinal de saída é também linear e isso caracteriza um Filtro Linear. São exemplos de Filtros Lineares todos os Filtros IIR, FIR; todas as tipologias Butterworth, Chebyshev, Bessel e Elíptico; e ainda os filtros ativos, passivos e digitais.
No caso de uma função matemática que não seja linear, o que caracteriza uma relação não-linear entre o sinal de entrada e o sinal de saída, nesse caso a configuração é de um Filtro Não-linear. São tipologias comuns para tratamento de imagens; Filtro Mediana, Filtro Moda, Filtro de Valor Máximo, Filtro de Valor Mínimo e Filtro de Variância; para tratamento de áudio, destacam-se; o Filtro de Hammerstein, Filtro de Volterra, Filtro de Wiener. Para outras aplicações há, em destaque, o Filtro de Transferência de Energia, aplicado em sistemas que envolvem frequências (emissões atômicas, áudio, etc…) e o Filtro Kushner-Stratonovich, muito aplicado para sistemas dinâmicos.
2.5 Classificação dos Filtros – Quadro resumo
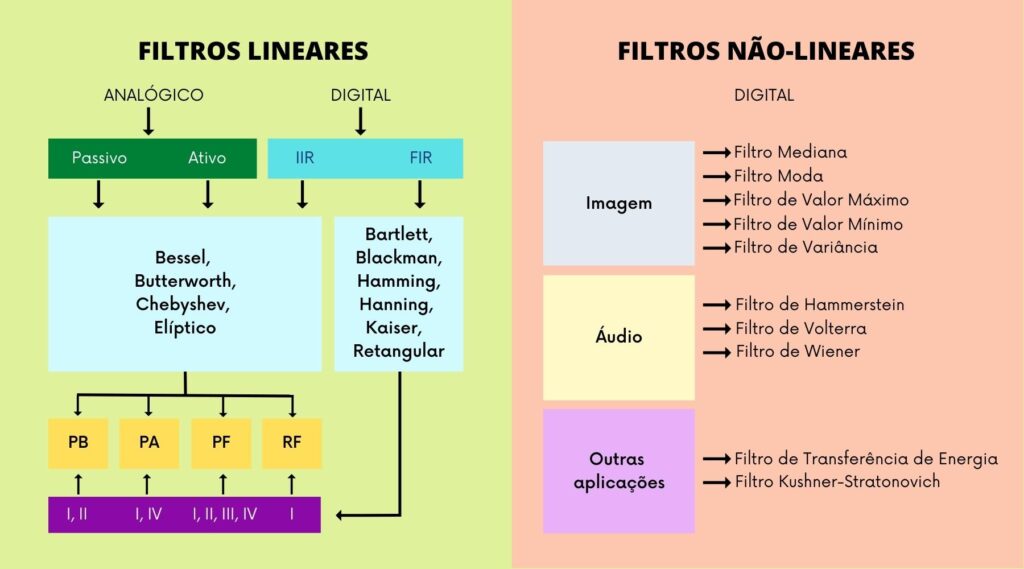
Existe ainda outra classe de Filtros, que são os Filtros Adaptativos. Eles podem ser analógicos ou digitais, entretanto, devido à característica intrínseca dessa classe de filtro, que tem um circuito em que os parâmetros se adaptam dentro de determinadas necessidades ao longo da linha do tempo, a maioria dos filtros adaptativos são digitais e não analógicos.
Os Filtros Adaptativos podem ser filtros com resposta linear ou não-linear. Assim, essa classe de filtro conversa com as outras características podendo apresentar diversas configurações possíveis.
3: Elementos característicos de um filtro
Ainda que cada projeto de filtro tenha suas particularidades, sobrepondo determinados elementos em detrimento de outros, os elementos que configuram os filtros são os mesmos. Um projeto pode requerer determinados elementos e outro projeto, com outra tipologia, pode requerer outros elementos, mas mesmo que eles sejam distintos, independentemente do tipo de filtro ele possui sempre os mesmos elementos que o caracterizam. Assim, os elementos característicos dos filtros são:
Banda de Passagem:
Banda de Parada:
Banda de Transição:
Ripple de Entrada:
Ripple de Saída:
Amplitude de Entrada:
Amplitude de Saída:
Ganho:
Frequência de Corte:
Frequência de Entrada:
Frequência de Saída: