1: Introdução
A tecnologia assistiva envolve dispositivos ou métodos auxiliares para locomoção, comunicação, alcance de objetos, leituras, etc., ou seja, formas para melhorar a qualidade de vida de pessoas portadoras de deficiência.
As áreas de engenharia e de medicina, e até biológicas, se encontram para satisfazer a essa necessidade, contribuindo com conhecimento aprofundado acerca das dificuldades a serem vencidas e os meios possíveis para se alcançar.
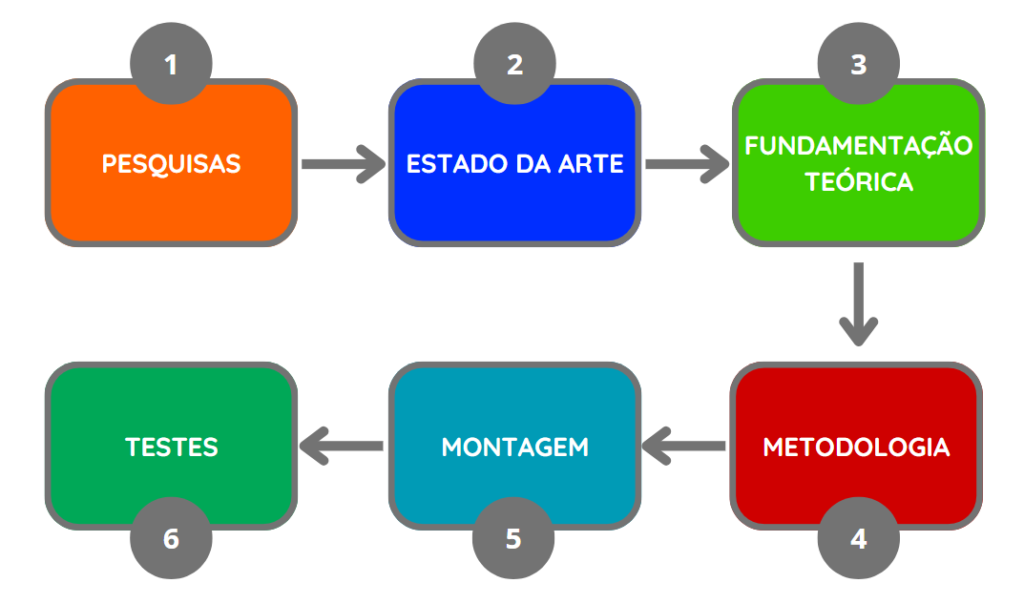
No presente artigo serão apresentadas as etapas que envolvem o desenvolvimento de um produto, neste caso, um dispositivo eletrônico para auxílio na locomoção de pessoas com deficiência visual. As etapas são:
- Pesquisas para levantar as características desejáveis
- Pesquisas para identificar produtos semelhantes no mercado
- Consultas a métodos teóricos e práticos que fundamentam o funcionamento do dispositivo e levantamento dos componentes que atendem aos requisitos verificados
- Montagem e testes do protótipo
2: Desenvolvimento de produto: Pesquisa
A principal fonte das informações que serão úteis ao desenvolvimento do projeto é o consumidor final. Quando nos baseamos unicamente em materiais didáticos e pesquisas pela internet, corremos o risco de desenvolver um produto que não apresenta grande utilidade e que pode facilmente ser substituído no mercado, pois pode não apresentar as características necessárias para o usuário.
O exemplo que trazemos neste artigo, é o desenvolvimento de um dispositivo eletrônico para auxílio na locomoção de pessoas com deficiência visual, ou seja, um recurso de tecnologia assistiva. Trata-se de um dispositivo que realiza leituras do ambiente e informa sobre a proximidade de obstáculos, como meio complementar à bengala branca que é normalmente utilizada por pessoas com ausência de visão ou baixa visão.
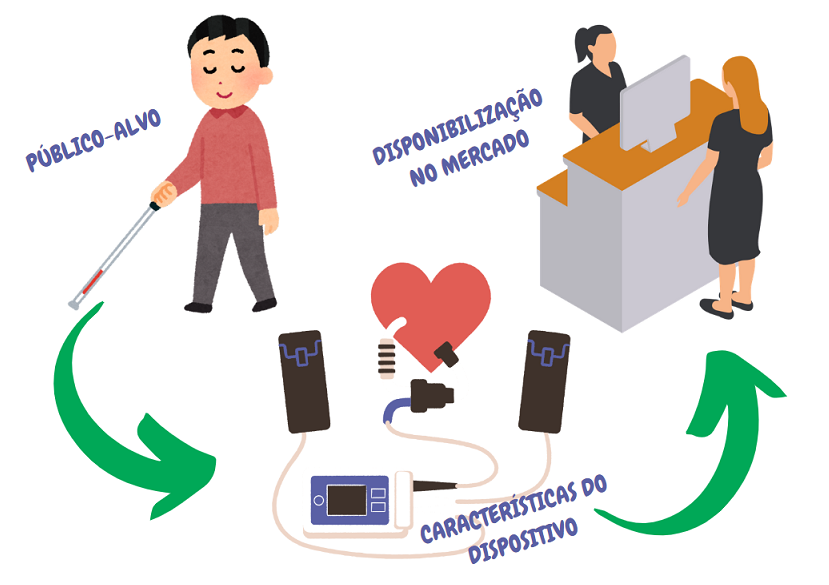
Para reunir os elementos necessários para o desenvolvimento do produto de tecnologia assistiva, precisamos levantar os seguintes pontos de forma mais genérica:
- quem irá utilizar o produto (público-alvo)
- quais funções o produto deve apresentar (características)
- forma de comercialização do produto
A fonte utilizada para levantamento das principais características para o produto foi a Instituição CADEVI – Centro de Apoio ao Deficiente Visual (www.cadevi.com.br), em entrevista realizada com o Diretor Presidente Sandro. O entrevistado, além de conviver com pessoas portadoras de deficiência visual, é também portador desta condição física, e portanto, representa nosso público-alvo.
Nessa etapa foi possível reunir as seguintes características desejáveis ao produto:
- que o produto tenha baixo custo
- que o dispositivo seja discreto
- que sinalize através de vibração a proximidade de obstáculos acima da linha da cintura (já que a bengala branca já cumpre com o papel nos demais casos)
3: Levantamento de dispositivos no mercado
Quando se trata do desenvolvimento de um produto para comercialização, é importante realizar um levantamento contemplando produtos similares no mercado, para que se verifique a adequação e aceitação do dispositivo a ser desenvolvido.
O levantamento deve considerar as características do produto, a avaliação dos consumidores e o valor de comercialização.
Em uma busca rápida pela internet, identificam-se variadas tecnologias auxiliares com funções similares ao dispositivo de interesse.
Uma pulseira de tecnologia assistiva que utiliza sensor ultrassônico para identificação dos obstáculos e sinaliza através de vibração ao usuário, foi a que mais se aproximou das características da pesquisa, pois se trata de um dispositivo discreto e com menor valor de comercialização.

Portanto, por se tratar de um produto muito próximo do que se pretende desenvolver, é necessário analisar as razões pelas quais se prosseguiria com o projeto. Quais são os diferenciais do produto?
- elementos de baixo custo para oferecer um produto mais acessível
- característica diferenciada
Na pesquisa realizada anteriormente, o entrevistado sugeriu um dispositivo versátil com possibilidades diferentes de uso: no pulso, em um cinto, ou em um colar, conforme a preferência do usuário. Desta forma a característica diferenciada é a versatilidade do produto. Além disso é possível disponibilizar um produto com valor mais acessível. Devemos considerar que a grande maioria das pessoas portadoras de deficiência visual são de baixa renda.
4: Fundamentação teórica
Para atender às características principais do dispositivo, é necessário avaliar as funções que o mesmo irá desempenhar, que neste caso são:
- leitura de dados do ambiente
- interpretação dos dados recebidos
- acionamento de vibração, conforme a proximidade de obstáculos
Para realizar a leitura dos dados é necessário um sensor, que atua com a emissão de um sinal, o qual interage com os objetos do ambiente e retorna com informações elétricas para o dispositivo. Uma forma alternativa ao sensor é o uso de uma câmera para captar as informações visuais, porém essa tecnologia possui alto custo, atualmente.
4.1: Escolha do sensor
Quanto ao sensor, há duas opções viáveis: o sensor óptico e o sensor ultrassônico.
O sensor óptico apresenta um custo mais elevado que o ultrassônico, e também maior precisão quanto à distância medida, obviamente devido à velocidade da luz em comparação à velocidade do som.
No entanto, considerando as características desejáveis para o dispositivo e o tipo de informação necessária, o sensor ultrassônico mostra ser suficiente para atender aos requisitos, uma vez que o dispositivo interpreta a distância e informa sobre a presença de obstáculos dentro de determinada faixa, mas não informa ao usuário qual a medida exata seja em centímetros, milímetros ou metros.
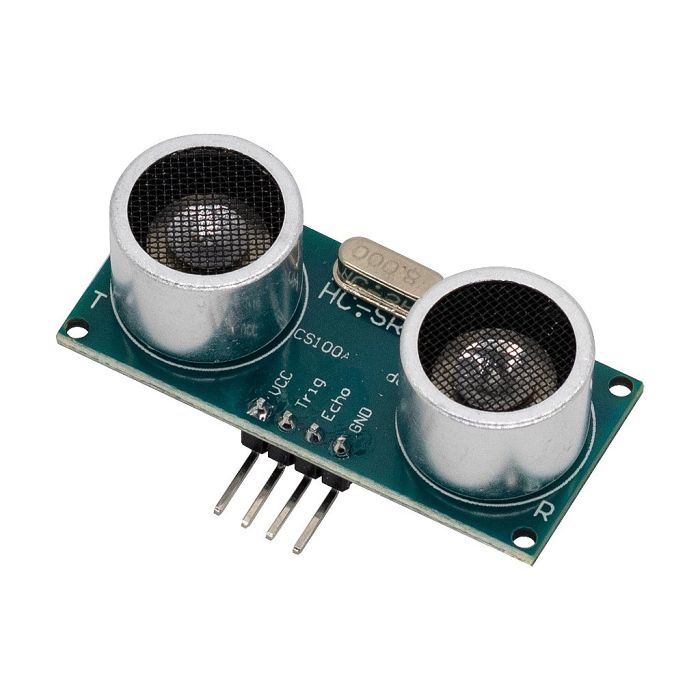
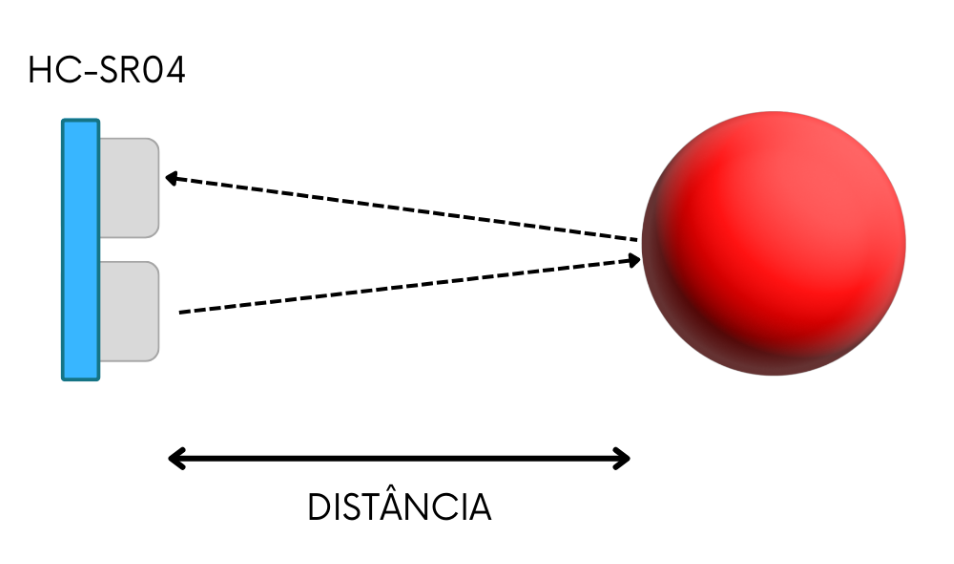
O sensor ultrassônico realiza a leitura do ambiente ao enviar um sinal sonoro em frequência não audível por humanos, o qual reflete nos objetos e retorna ao dispositivo como um sinal de eco, de igual frequência. O tempo medido a partir da emissão do sinal até seu retorno, é temporizado por um microcontrolador, que interpreta o tempo de forma a considerar a distância do objeto e assim, aciona ou não a saída. Dentre os sensores comercializados atualmente, pode-se optar inicialmente pelo modelo HC-SR04, que é facilmente encontrado e apresenta menor custo.
A equação para cálculo da distância a partir do sinal do sensor ultrassônico é:
Onde:
d: distância entre o sensor e o obstáculo [m]
v: velocidade do som [340 m/s]
t: tempo de ida e volta do sinal [s]
Exemplo: um objeto que esteja a uma distância de 50 cm, fará com que o microcontrolador temporize por 2,94 ms.
4.2: Escolha do microcontrolador
O microcontrolador para interpretar esses dados deve ter uma entrada para o sinal de eco do sensor, uma saída para o sinal de trigger e uma saída para acionar o motor de vibração, totalizando 3 terminais com características específicas.
Existem muitos microcontroladores que atendem a esses quesitos, porém deve-se pensar no visual do dispositivo, que deve ser discreto. Para atender a esses critérios, os microcontroladores da família PIC são de pequena dimensão e possuem baixo custo. Considerando os terminais necessários entre o sensor e a saída, as funções de temporizador, e os terminais comuns de alimentação e aterramento, pode-se optar pelo PIC 16F628A, por exemplo.

5: Metodologia para o desenvolvimento do produto
Agora é necessário desenvolver o programa que fará a interface entre o sinal do sensor e o acionamento do mecanismo de vibração. Além disso deve-se verificar o consumo de corrente do dispositivo com os componentes para estabelecer a alimentação do circuito.
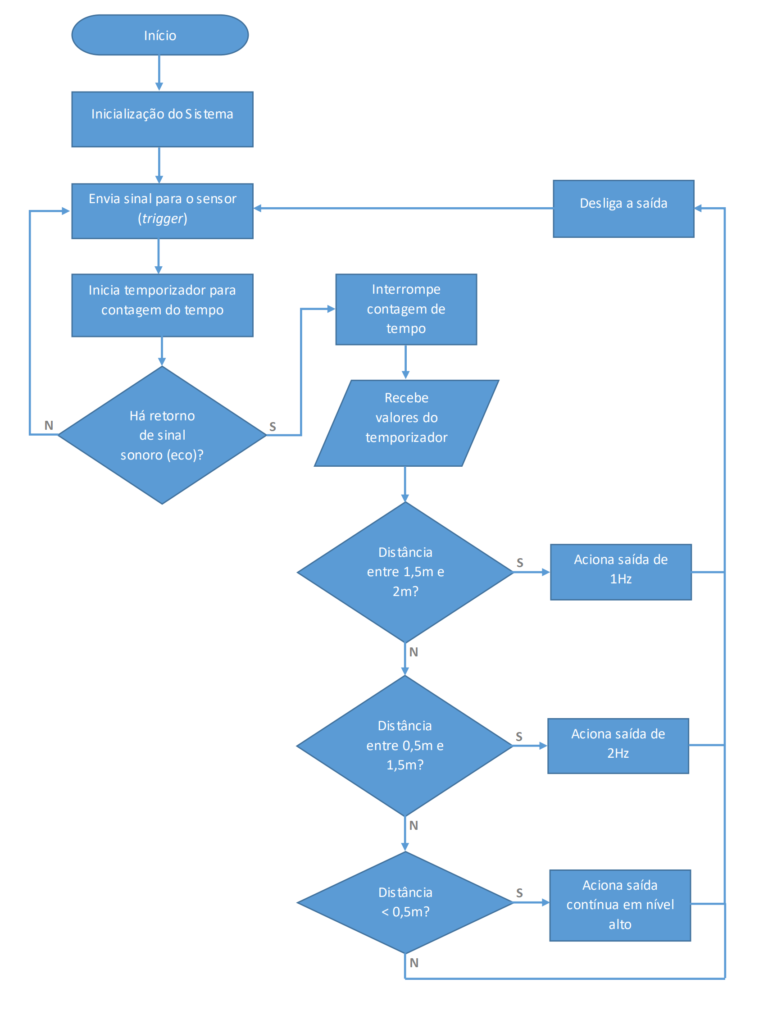
Inicialmente, o programa deverá seguir o seguinte fluxo:
1) Enviar sinal alto para o sensor (trigger) e iniciar o temporizador
2) Quando houver retorno do sinal (eco), interromper o temporizador
3) Receber valores do temporizador
4) Se a distância é menor que 2m, acionar a saída do mecanismo de vibração
Fluxograma completo:
Com o programa concluído, é possível simular o funcionamento em um software que disponha das ferramentas necessárias. No entanto, observamos certa instabilidade na variação dos valores, quando um objeto é aproximado ou afastado do sensor. Isto ocorre devido ao tempo para reiniciar o temporizador, uma vez que o mesmo depende do sinal emitido pelo microcontrolador enquanto não se obtenha o sinal de eco.
Para tratar esses dados e melhorar a performance, incluimos um filtro digital no tratamento dos dados, o qual calcula a média móvel a partir de determinado número de amostras iniciais estabilizando os valores, pois são eliminados os picos característicos apresentados pelo sensor na variação da distância.
6: Montagem do dispositivo
A montagem do dispositivo depende dos materiais disponíveis que atendam aos requisitos do projeto. Na impossibilidade de se encontrar um invólucro com as dimensões necessárias para conter os componentes do dispositivo ao mesmo tempo que seja discreto, pode-se optar por imprimir em impressora 3D.
Para projetar o invólucro consideramos as dimensões do maior componente – neste caso o sensor ultrassônico, a disposição do microcontrolador, do motor de vibração, e em especial qual a bateria necessária como fonte de alimentação. Lembrando que, quanto maior a carga e menor a dimensão, maior o custo. Portanto é necessário avaliar este item com cuidado.
6.1: Capacidade da bateria
Para calcular a capacidade necessária da bateria para o dispositivo deve-se consultar as informações do datasheet de cada componente.
Conforme o datasheet, a alimentação para o sensor e o para microcontrolador é de 5V, e do motor entre 2,5 e 4V. O consumo de corrente do circuito será a soma do consumo dos componentes:
- 2 mA para o sensor ultrassônico
- 0,2 mA para o PIC
- 90 mA para o motor quando acionado
Somando-se as correntes obtemos 92,2 mA. Multiplica-se a soma por 1,2, valor convencionado que considera perdas e consumos não conhecidos. Assim obtém-se o total de 110,62 mA de consumo do circuito.
Para calcular a capacidade da bateria em Ah (Ampére hora), utiliza-se a seguinte equação:
Onde:
t : Tempo [h]
c: Capacidade da bateria [A/h]
i: Corrente [A]
Para uma duração aproximada de 4h, considerando que o uso seja em vias públicas e áreas externas:

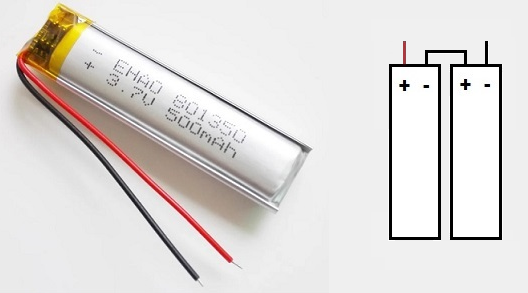
Para as especificações adotadas para o projeto de desenvolvimento do produto, com tensão mínima necessária de 5V e capacidade aproximada de 500mAh, pode-se optar pelo uso de baterias de lítio recarregáveis de 3,7V e 500mAh dispostas em série conforme a figura 3:
Imagem das baterias em série, totalizando 7,4V e 500mAh:
6.2: Lista de componentes
Assim, a lista de componentes para o protótipo do produto final é a seguinte:
- PIC 16F628A
- Sensor ultrassônico HR-SC04
- Motor de vibração
- Optoacoplador 4N35 (proteção do circuito)
- Transistor NPN 2N3904
- Diodo
- Resistores
- Capacitores
- Chave switch
- Regulador de tensão LM7805
- Baterias de lítio ou equivalente (>= 6V)
Diagrama elétrico do circuito:
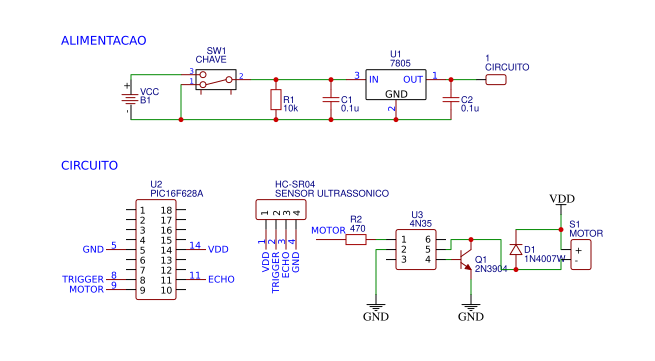
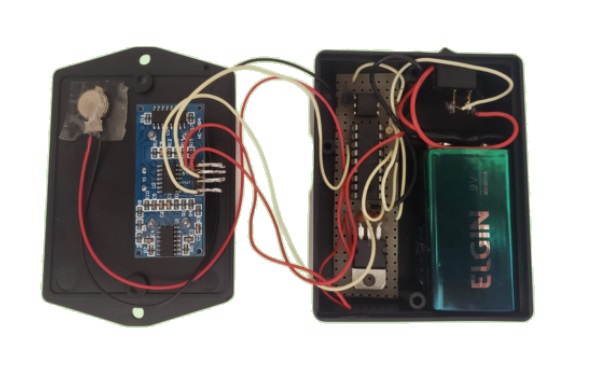
Imagem do protótipo, parte interna com as ligações:
6.3: Versatilidade do dispositivo de tecnologia assistiva
Por se tratar de um dispositivo de tecnologia assistiva, que será portanto, utilizado por pessoas que apresentam alguma deficiência, sendo neste caso cegueira ou baixa visão, o mesmo precisa ser de fácil utilização. Uma alternativa idealizada é de que o dispositivo possua uma espécie de grampo que possa ser facilmente afixado em uma pulseira de velcro ou em uma espécie de cordão e, desta forma, posicionado no pulso, em um cinto ou pendurado ao pescoço. A imagem abaixo representa as formas possíveis de uso que atendem ao propósito do dispositivo, de identificar obstáculos acima da linha da cintura.

7: Fase de testes
Os testes devem anteceder a apresentação do produto final. O ideal é produzir o protótipo com os mesmos componentes da versão final ou, na impossibilidade, componentes semelhantes, pois é possível que ocorra a substituição de componentes após as revisões desta etapa.
A fase de testes possibilita verificar se o funcionamento do dispositivo atende ao projeto de desenvolvimento do produto. É o momento de efetuar registros de dados, como por exemplo, no caso do dispositivo para auxílio na locomoção de pessoas com deficiência visual: diferentes objetos para detecção e variadas faixas de distância, com a simulação de situações reais de locomoção em vias públicas, com obstáculos acima da linha da cintura, conforme levantamentos iniciais.
Imagem da realização de testes do programa em protoboard, com leitura dos sinais em osciloscópio:

Todos os resultados obtidos devem ser registrados: quais objetos foram detectados e em qual faixa de distância, quais não foram detectados e os prováveis motivos. Deve-se considerar as características e limitações dos componentes do circuito, de forma a tornar a análise conclusiva e não restar pontos não observados na fase de testes, pois estes podem ser detectados pelo consumidor final, gerando desconfortos futuros.
Com o protótipo funcionando dentro do esperado para o projeto, os próximos passos são a produção do dispositivo para comercialização e seu lançamento comercial.
Imagem do protótipo em invólucro impresso 3D:

8: Conclusão
As etapas do projeto são sequenciais e, ao serem cumpridas a seu tempo, garantem o sucesso do projeto. Quando bem delineadas e aprofundadas em pesquisa, os empecilhos que surgem durante o processo de montagem do dispositivo apresentam soluções menos complicadas e menor impacto no cronograma de desenvolvimento do produto.
O desenvolvimento do código na linguagem C e a gravação do programa no microcontrolador PIC resultaram em uma etapa bastante extensa. Trata-se de um processo moroso de consulta das funções em datasheet, para compreender como habilitar cada função no terminal e torná-la útil às requisições do programa. A gravação através de dispositivo próprio é simples, e requer pouco recurso computacional. Em artigos futuros faremos o detalhamento do processo de criação do programa e gravação no microcontrolador PIC.
Por fim, ao seguir a sequência de etapas do processo, foi possível desenvolver com acerto o dispositivo de tecnologia assistida que fora inicialmente proposto, com atendimento dos seguintes requisitos:
- Baixo custo (< R$200)
- Sinalização por vibração
- Versatilidade